I recently installed the pi-hole app (version 2.0.14) and followed this guide step by step. Additionally, in the pi-hole web interface I selected “allow only local requests”, and I ran ipconfig /renew from a Windows 11 machine command prompt on my network.
From that same Windows machine I then opened Firefox, disabled uBlock Origin, and visited speedtest.net. But I’m still seeing ads. I’m seeing activity on the web interface.
Even if you install a lot of lists (see firebog for a set of lists, among other places) some ads will still get through.
You may also have to add some web sites to your pi-hole whitelist so the queen bee can still go shopping.
I suggest maintaining multiple, identical pi-hole DNS servers in case you need to take one down for maintenance / updates. You can typically config up to three per gateway / router in the DHCP settings. Good luck.
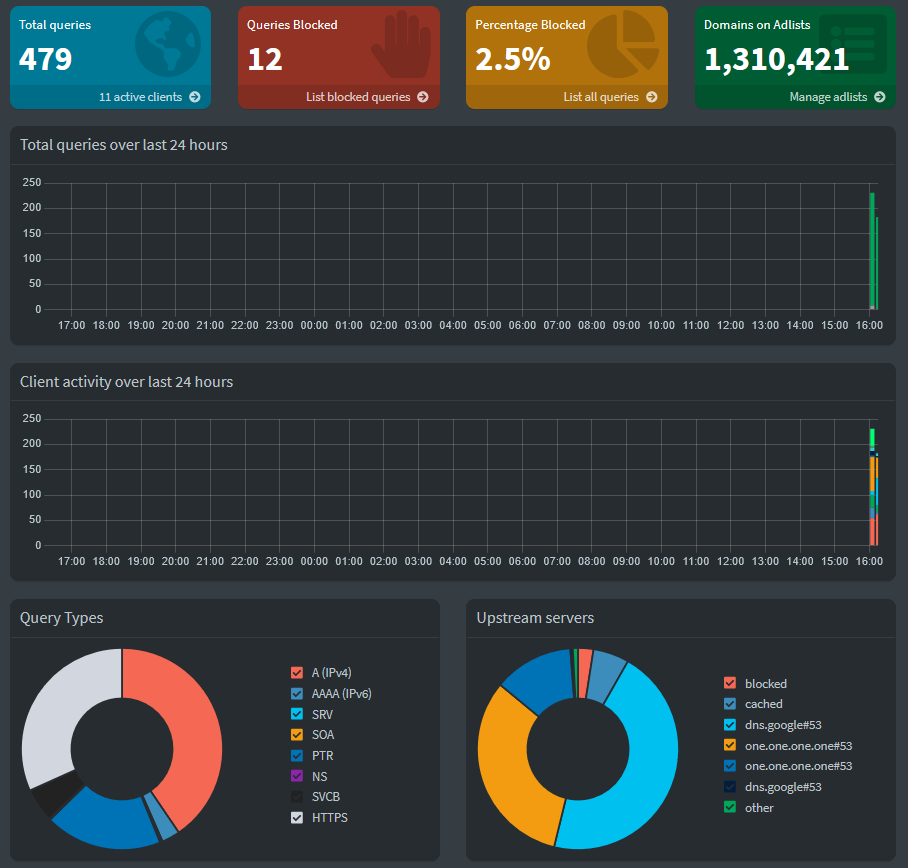
Even if you had the wrong blocklists installed for your locale, you’d still see queries being run through Pi-Hole. It’s showing 11 clients connected, but barely any traffic. So maybe your router isn’t using the Pi-Hole for DNS resolution? I’d check the video you linked at around the four-minute mark.
But also it’s not a good idea to use a machine that depends on network connectivity to function (your NAS) for network resolution.
Sure, but I would not ask for WhatsApp Support in a Windows or iPhone forum, just because WhatsApp runs on Windows or iOS.
I am not trying being snarky, it is just some of the most basic question without any details. You will find tons of posts like yours in the pihole forum and also what the solution(s) for that problem is.
Two things.
A: pihole is a DNS blocker. It can block traffic by not resolving some DNS requests. It can’t block
YouTube ads or if a website shows you traffic from its on server or some server that is not on the blocklist.
B: Make sure your devices are using pihole as a DNS server. No iCloud Private relay, no DoH, no hardcoded 8.8.8.8 DNS. Do you have 11 devices on your network?
I’m considering adding a pi hole to my NAS as a third DNS resolver, for redundancy without making the network dependent on it. The more piholes you add, the more resilient the network will be but unless they talk to each other and sync changes (and there is a package for that), making changes in triplicate does get old.
I’m incredibly new to networking, so sorry if I’m misunderstanding and asking the wrong questions. But you’re saying adding a raspberrypi pi-hole would be good as a redundant addition to pi-hole on my NAS?
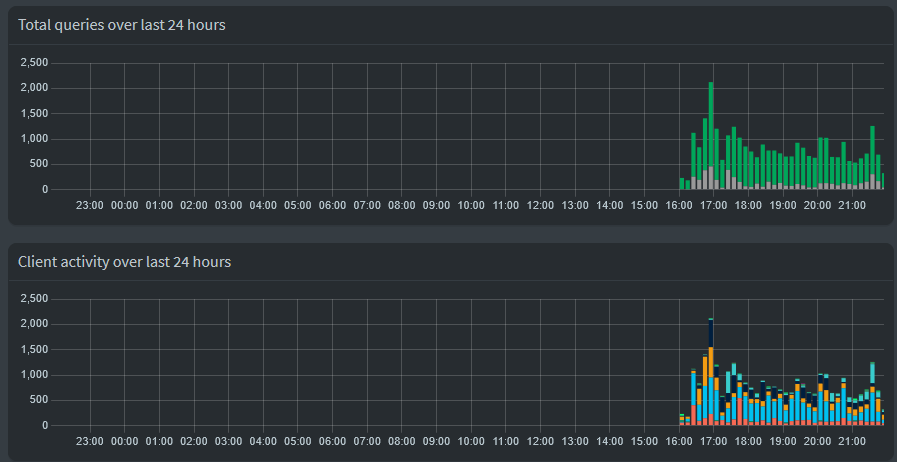
Also, pi-hole seems to be blocking ads correctly now and my traffic has increased a lot since I first posted this.
I understand what you mean, and I didn’t think you were being snarky.
As I mentioned in another reply, I am very new to almost everything networking related and figuring things out as I go (Link Aggregation was a pain) but I’m slowly getting things running correctly.
As of now pi-hole is showing 14 devices (most likely these are smart home devices) and is blocking all ads on speedtest.net. I didn’t change anything so maybe it just needed time? Idk haha
edit: I’m going to mark this reply as the solution since everything seems to be working correctly now.